SURVEILLANCE par GPS
Présentation du montage
Logiciel de commande
Télécharger la dernière mise à jour
Difficultés rencontrées
Pour commander le numéro 339
Pour me contacter
Informations sur le montage :
Date de publication :Juin 2009
Prix approximatif des composants : 120 euro
Difficultés : **
Temps approximatif de réalisation (câblage + CI + essais) : 2-3h
Prix du kit : Me contacter
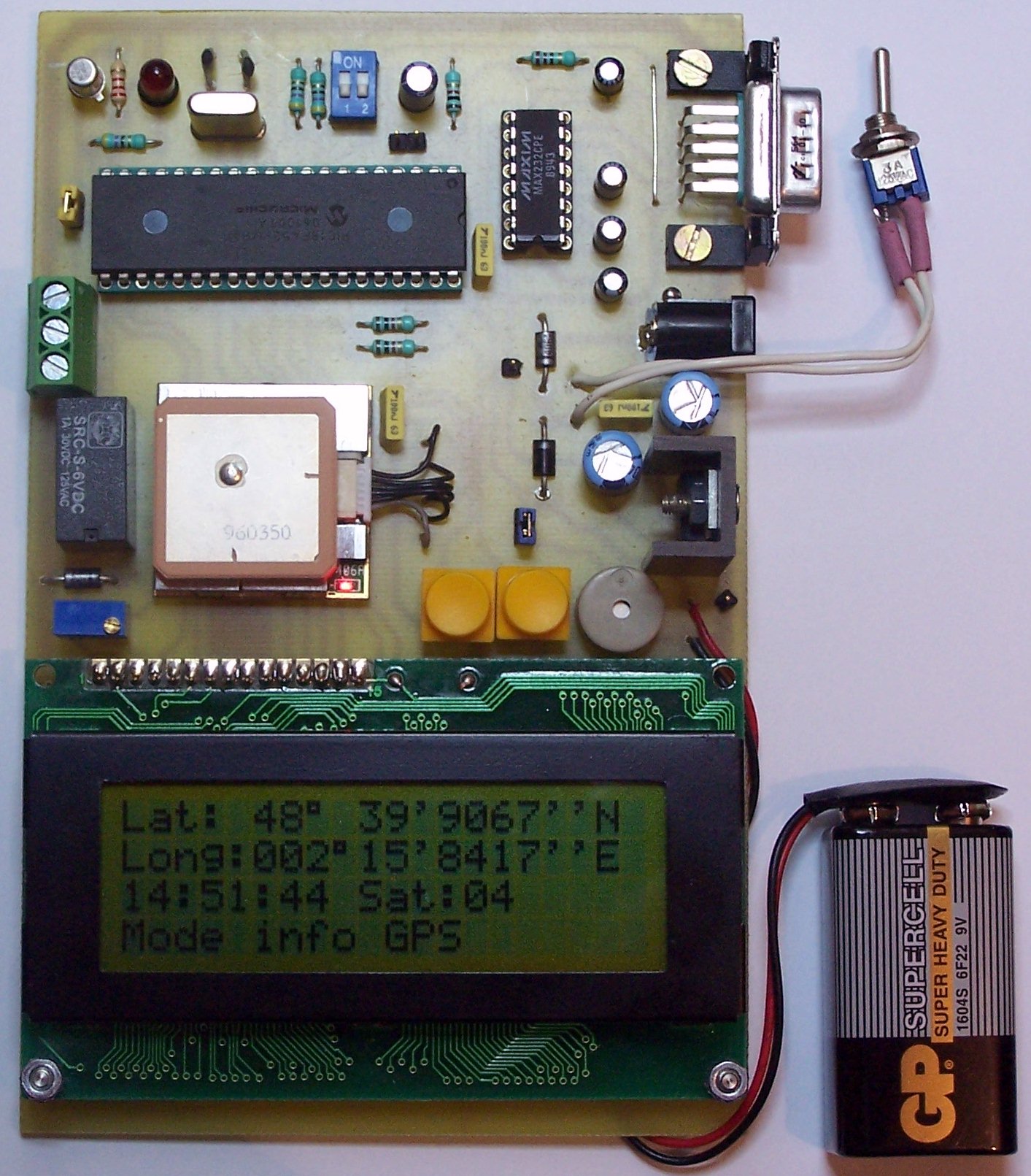
1 - Présentation du montage :
Avec le succès sans aucune mesure des GPS embarqués notamment pour lautomobile, il existe aujourdhui sur le marché des modules grand public très performants permettant de pouvoir créer sa propre application et de bénéficier des informations fournies par les satellites. La platine décrite dans cet article est équipée dun module EM 406 (disponible chez Lextronic) qui vous permettra de recevoir jusquà douze satellites ceci avec une très grande sensibilité (voir caractéristiques EM 406A).
Historique
Le GPS (Global Positioning System) qui pourrait se traduire par système de positionnement mondial a été conçu par le physicien D. Fanelli et mis en uvre par le Département de la Défense des États-Unis (DoD) . Le premier satellite fut lancé en 1978. Le système GPS comprend aujourdhui 31 satellites artificiels (4 de réserve) répartis sur 6 plans orbitaux dont lorbite se situe à 20 184 km d'altitude avec une inclinaison de 55 degrés. Ils mettent environ 12 heures (11h58 min exactement) pour effectuer une rotation. Les satellites se suivent à 6 heures dintervalle. Il y a eu plusieurs lancements de satellites, les premiers ne furent réellement opérationnels qu'en 1995. La durée de vie dun satellite est denviron 9 ans, ils sont remplacés en fonction des avancées technologiques. Les signaux transmis par les satellites peuvent être librement reçus et exploités par quiconque, la seule contrainte est bien sûr dêtre équipé dun récepteur GPS, il est ainsi possible de connaître avec une très grande précision sa position sur la surface de la Terre, sur mer, dans l'air ou encore dans l'espace (au voisinage de la Terre). Le système GPS a connu un grand succès notamment dans le domaine civil et a généré un énorme essor commercial dans de nombreux domaines publics et scientifiques. Le GPS est principalement utilisé pour localiser toutes sortes de mobiles (véhicules, navires, avions, missiles, satellites évoluant en orbite basse).
Le GPS étant un système développé pour des besoins militaires, certaines informations peuvent être cryptées afin dinterdire la possibilité davoir une application bénéficiant dune précision maximale pour quiconque ne possède pas les informations de décodage. Ainsi pendant de nombreuses années, les applications civiles n'avaient accès qu'à une précision denviron 100m, le 1er mai 2000, le président des Etats Unis a annoncé qu'il mettait fin à cette dégradation volontaire du service. Depuis cette date, il est possible de déterminer une position avec une précision qui évolue entre 10 et 20 mètres.
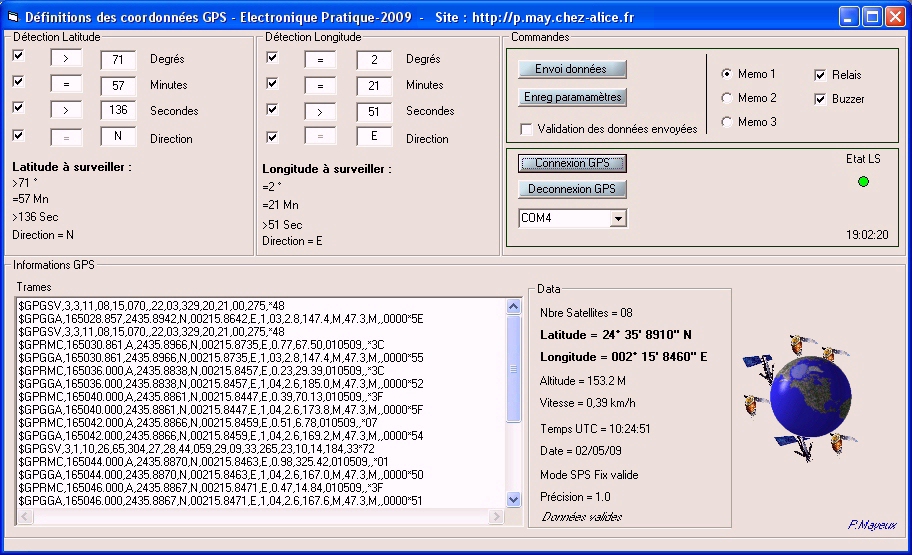
Logiciel de commande
Fonctionnement
Si les deux switch sont en mode Normal les informations GPS sont redirigées chaque seconde vers lentrée RB4 du PIC. Le programme du PIC scrute lentrée RB4 en permanence puis dès que la fin de réception est détectée celui-ci mémorise alors les informations issus de la trame $GPGGA dans un tableau de 82 caractères, puis traite celles-ci selon le décodage définit dans le protocole NMEA (Tableau de la trame $GPGGA vu précédemment). Ce traitement permet de définir les champs Latitude , longitude , Heure et nombre de satellites , qui seront ensuite envoyés vers lafficheur. La 4eme ligne de lafficheur indique Mode info GPS . Les champs sont également mémorisés à chaque réception dans des variables afin de réaliser une éventuelle comparaison avec une position à surveiller (Mode détection détaillée ci après). A tout moment il est possible de mémoriser la position courante (longitude et latitude) par un appui long sur le bouton poussoir BP1. La troisième ligne de lafficheur propose alors une sortie à valider (relais, buzzer, relais+buzzer, annulation) , choix rendu possible par des appuis successifs sur le bouton BP1. Une fois le choix fait un appui sur le bouton poussoir BP2 valide la sélection (le message Mémorisation est alors envoyé sur la 4eme ligne de lafficheur). La phase de mémorisation entraîne également une écriture du point à surveiller en EEPROM, ainsi en cas de coupure dalimentation la position est sauvegardée, elle sera repositionnée dans le programme à la remise sous tension.
2 - Téléchargement de fichiers
Les logiciels sont disponibles sur notre site Internet ou bien depuis le menu "Telecharger"
3 - Utilisation
Voici un bref aperçu des nombreuses possibilités offertes par le module GPS EM 406. Ce type de montage pourra trouver de nombreuses applications comme anti-vol par exemple ou il suffira de mémoriser des barrières à ne pas dépasser (points géographiques), ou encore mémoriser un lieu particulier afin de le retrouver. Il sera possible également de déterminer un endroit ou un appareil peut fonctionner, sil sort de ce périmètre il ne fonctionnera plus. Depuis un PC il sera également possible de définir des fourchettes permettant de couvrir dans ce cas toute une zone à surveiller. Avec une mémoire supplémentaire type carte SD ou autre il serait possible denregistrer tout un parcours effectué. On pourrait également imaginer avec quelques modifications du source des déclenchements combinés sur une heure ou encore une vitesse ou une altitude tout ceci restant dans le domaine du possible
.
4 - Problèmes rencontrés
Le fichier manquant "MSCOMM32.OCX " est ajouté dans le ZIP.
5 - Mise à jour